Abstract
Drift is an agile maneuvering technique that can transiently change the vehicle heading angle. By exploiting the appealing skill, we can broaden the control envelop of autonomous vehicles and keep vehicles controllable even in extreme situations. However, vehicle models at drift states are highly complex, and the parameters are hard to identify. To solve this problem, in this paper we use a relatively simple vehicle model combined with a neural network that can compensate for model errors to capture a more accurate vehicledynamics. Moreover, the model is then linearized at the drift equilibrium points to construct a fast drift controller based on Model Predictive Control(MPC). Besides, a drift control system is introduced to make the vehicle in drift states and track a complex path simultaneously. The effectiveness of this control scheme is verified by simulations on the Matlab-Carsim platform and experiments on a 1/10 scale RC car.
Contributions
1. Proposing a learning-based vehicle model that combines physics-based models with vehicle data to improve accuracy, applied to the MPC drift controller.
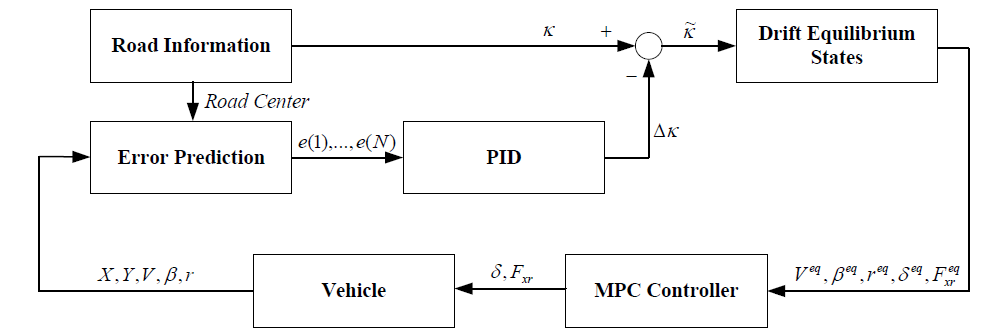
2. Improving the drift controller by converting lateral error to curvature difference through a PID controller, determining drift equilibrium states based on road curvature.
3. Developing a drift control system that stabilizes the drift state while following a path.
4. Comparing the learning-based model with a traditional single-track model, showing its superior performance in drift control along a path.