Abstract
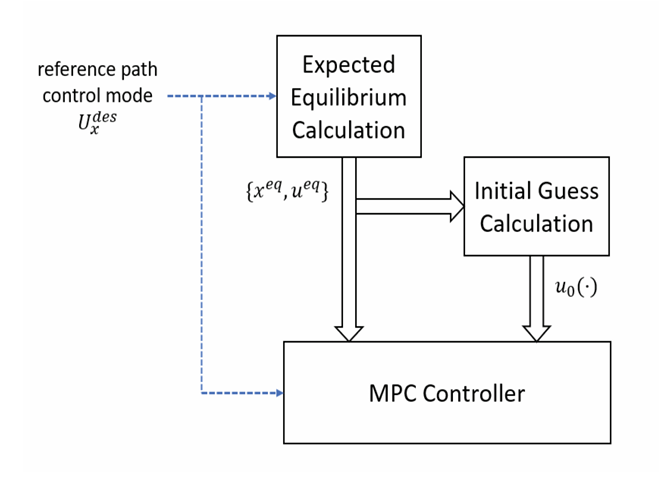
In a rally competition, professional drivers usually adopt a very aggressive strategy. Agile maneuvering such as 'drifting' often occurs during the cornering process. In this paper, a controller framework is present for the vehicle's agile maneuver based on Model Predictive Control (MPC). We introduce the 3-state vehicle model and the brush tire model and analyze the trajectory characteristics of drift equilibrium. The proposed control system can track the variable drift state and the reference path simultaneously and is appliable for both regular driving and drift cornering. Different from the previous studies on drift stability or drift cornering, the system can not only realize lane keeping in complex scenarios but also achieve autonomous drift maneuvering during the cornering process. The effectiveness of the system is validated via simulations on the Matlab-Carsim platform.
Contributions
1. This paper designed an MPC controller that can track the variable drift state and the reference path at the same time.
2. This paper proposed a control system that can switch between regular driving mode and drifting cornering mode.