Abstract
Autonomous drifting is a complex challenge due to the highly nonlinear dynamics and the need for precise real-time control, especially in uncertain environments. To address these limitations, this paper presents a hierarchical control framework for autonomous vehicles drifting along general paths, primarily focusing on addressing model inaccuracies and mitigating computational challenges in real-time control. The framework integrates Gaussian Process (GP) regression with an Alternating Direction Method of Multipliers (ADMM)-based iterative Linear Quadratic Regulator (iLQR). GP regression effectively compensates for model residuals, improving accuracy in dynamic conditions. ADMM-based iLQR not only combines the rapid trajectory optimization of iLQR but also utilizes ADMM's strength in decomposing the problem into simpler sub-problems. Simulation results demonstrate the effectiveness of the proposed framework, with significant improvements in both drift trajectory tracking and computational efficiency. Our approach resulted in a 38% reduction in RMSE lateral error and achieved an average computation time that is 75% lower than that of the Interior Point OPTimizer (IPOPT).
Contributions
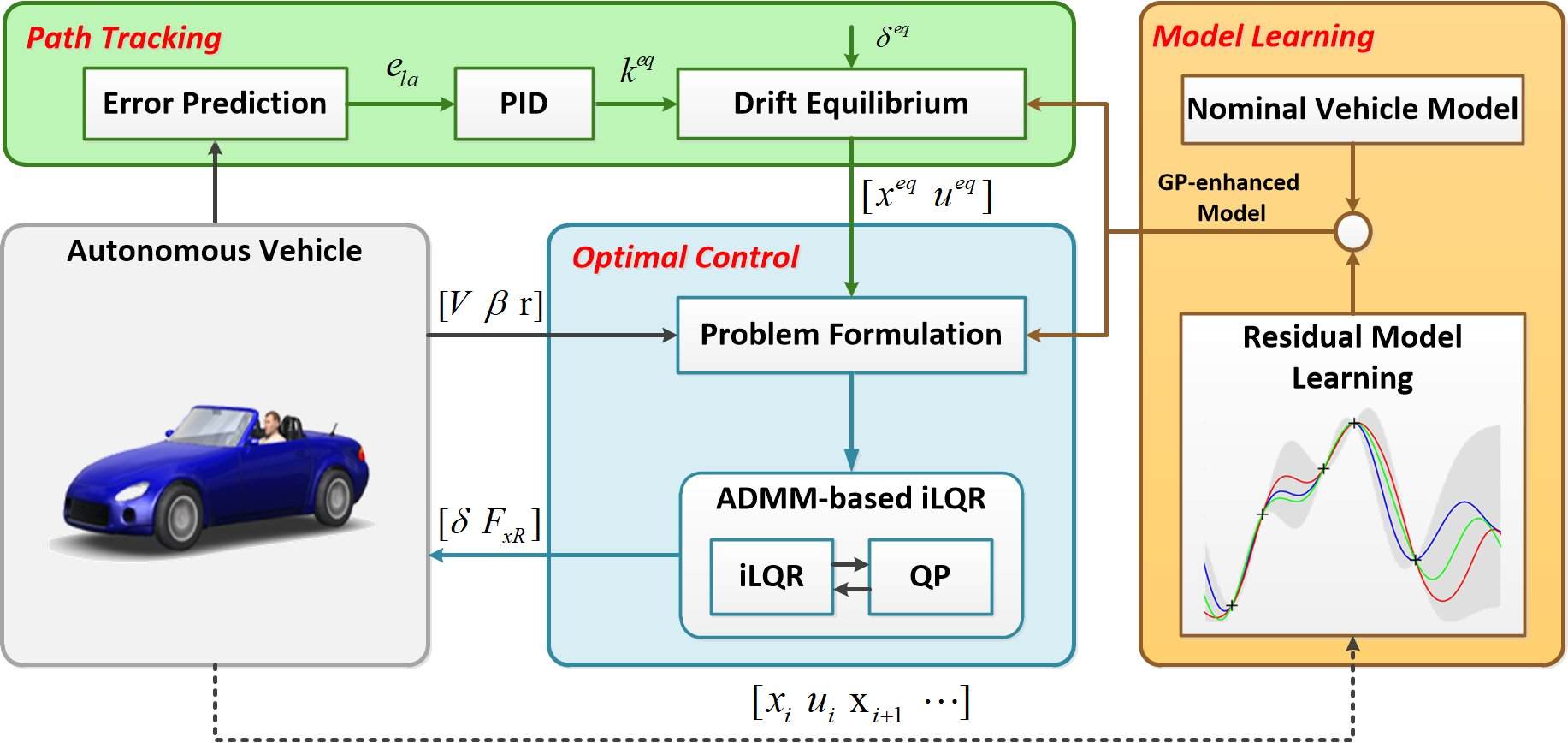
1. A hierarchical control framework is proposed for autonomous drifting, enabling vehicles to follow general paths. GPs are employed to correct model mismatches, significantly enhancing performance.
2. ADMM decomposes the optimization into two sub-problems, solved efficiently with iLQR and Quadratic Programming (QP), reducing computational burden.
3. Simulation results highlight the framework’s effectiveness, showing a 38% reduction in lateral error with the integration of GP and a 75% decrease in average computation time compared to IPOPT. Additionally, the method demonstrates robustness under varying friction conditions.