Abstract
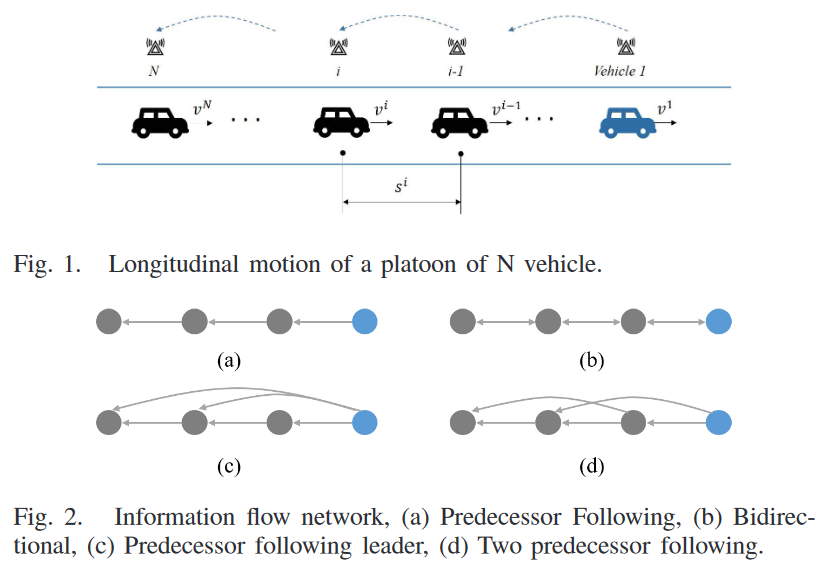
To successfully implement the platoon control of connected and automated vehicles (CAVs), the model uncertainties, external disturbances, and time delays must be addressed. In this study, we propose a distributed Model Predictive Control scheme to achieve offset-free tracking for CAVs with model uncertainties and mixed disturbances which contains both stochastic and deterministic noises. A simple Vehicle-to-Vehicle communication flow with the short-distance and low-volume information exchange is adopted to reduce the effect of the communication delay and dropout. First, the deterministic and stochastic perturbances are addressed separately in constraints handling with an integrated control law based on the mismatched prediction model. Additional constraints on coupling input and output are imposed to guarantee the assumption about forecast trajectory. Then an observer gives an unbiased estimate of the state and integrated disturbance. Based on the estimation, the target calculator eliminates the steady tracking offset by designing a new target in real-time and the Min-Max Model Predictive Control steers the uncertain systems to the new target under the worst case within the domain of disturbances. Lastly, the Optimal Control Problem is reformulated and can be efficiently solved by existing solvers. Simulation results indicate that the proposed method shows superiority in interference rejection and offset-free tracking.
Contributions
1. We develop a distributed MPC method for platoon control and achieve offset-free objective tracking under the condition that every vehicle could be affected by mixed disturbances and model mismatch. The effect of disturbances is considered in the formulation of the predictive model to avoid violating constraints. The offset elimination considering deterministic disturbances and model mismatch are emphasized in controller designing.
2. We design a constraint formulation for the mixed disturbance in a distributed manner. The stochastic and deterministic components are treated separately when tightening the chance constraints. The stochastic disturbances are considered from a global perspective while the deterministic disturbances from a local viewpoint by lumping the error of coupling input into the local disturbances under a necessary assumption. Extra constraints on coupling output are designed to guarantee the assumption.