Abstract
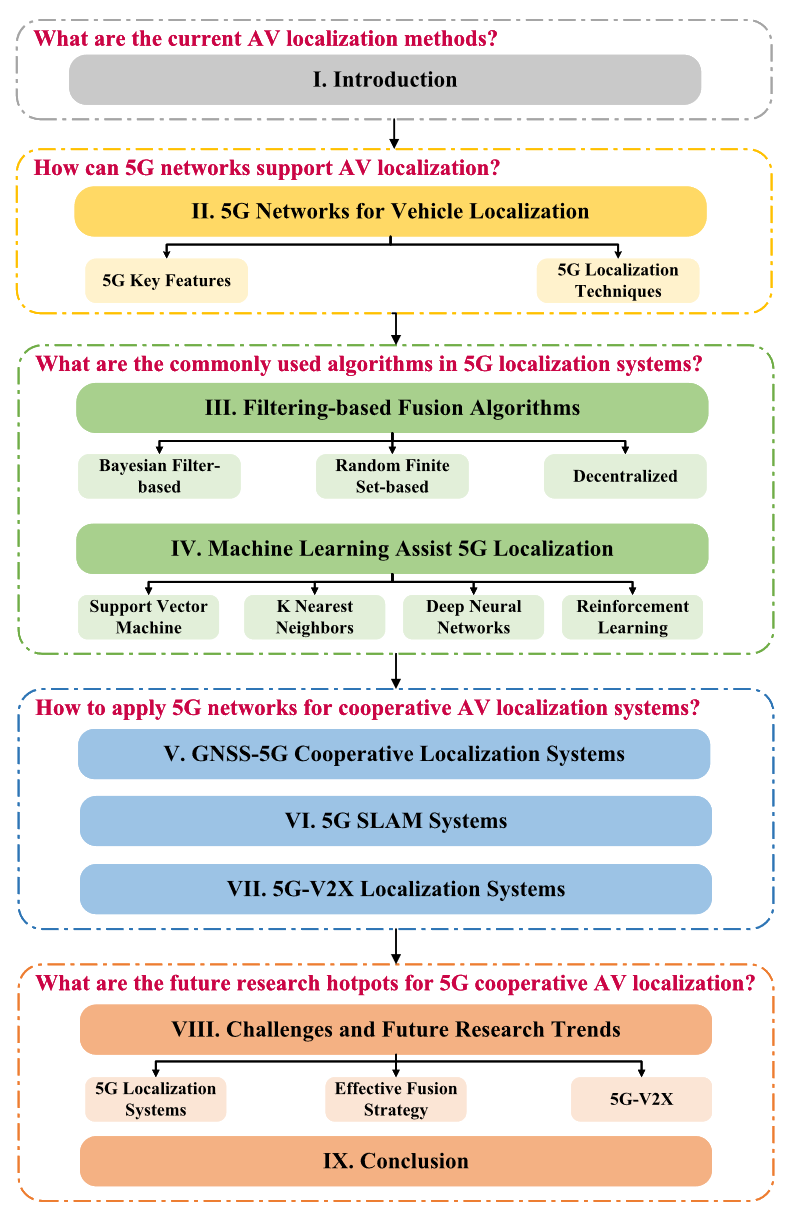
Precise and real-time localization is the key for autonomous vehicles (AVs) to solve traffic, environmental problems and support intelligent vehicle applications. Existing AV localization methods typically rely on the cooperation between onboard sensors, cellular systems, and vehicular networks to satisfy the high localization requirements. The advent of 5G networks can not only revolutionize cellular localization performance but also provide adept capacity to handle massive sensor data and dependable vehicle-to-everything (V2X) transmission at impressive speeds with minimal latency. These advancements stir expectations to promote cooperative AV localization from lane-level accuracy to centimeter-level. The purpose of this survey is to elaborate on the predominance of applying 5G networks for cooperative AV localization, which overviews 5G new radio features, 5G localization techniques, and the pivotal algorithms supporting 5G AV localization, including filtering-based and machine learning algorithms. Three applications of 5G cooperative AV localization are highlighted, respectively the integrations of 5G networks with satellite systems, simultaneous localization and mapping algorithms, and vehicular networks. Moreover, this survey analyzes the challenges in existing 5G cooperative AV localization systems and summarizes the potential research hotspots for further development.
Contributions
1. This paper focuses on the relationship between AV localization and advanced 5G technology, which introduces 5G key features and localization techniques supporting cooperative AV localization.
2. Filtering-based and machine learning algorithms are recommended for their pivotal contributions to 5G AV localization systems.
3. Three applications of 5G cooperative AV localization are discussed, respectively GNSS-5G cooperative localization, 5G simultaneous localization and mapping (SLAM), and 5G-V2X localization, detailing their techniques and achieved localization accuracy.
4. This paper examines challenges within 5G cooperative AV localization and proposes potential research directions for future studies.